Trailing Losses Validation
[1]:
import numpy as np
import matplotlib.pyplot as plt
from sorcha.modules import PPTrailingLoss
Validation Jupyter Notebook for PPTrailingLoss function in sorcha
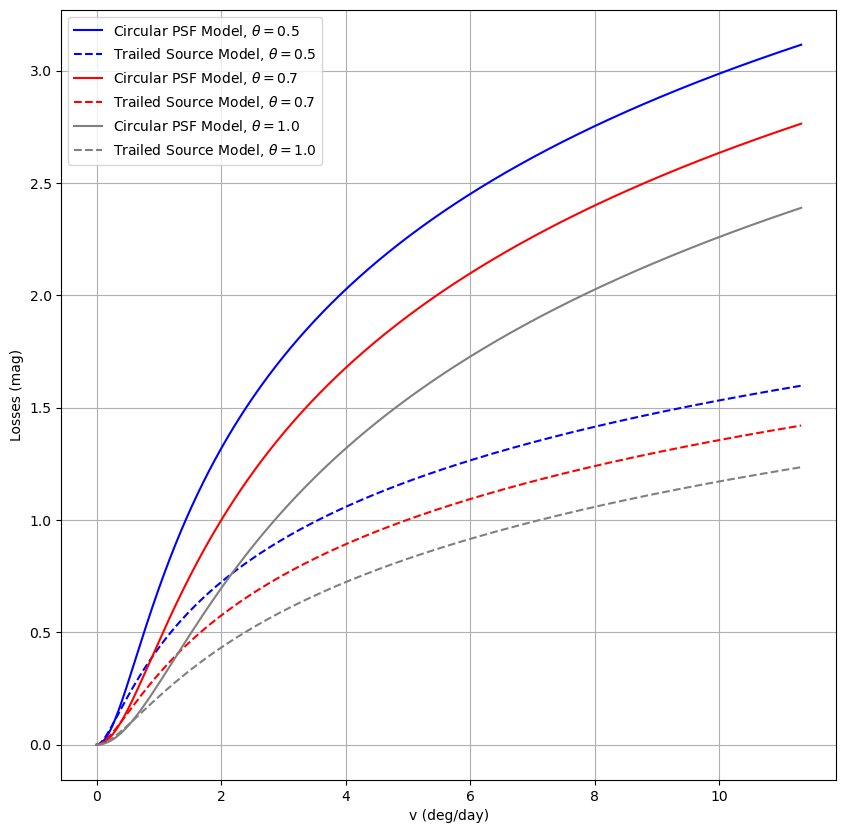
Validation is done by calling PPTrailingLoss and comparing to the results from Jones et al. (2018) Icarus 303 181 https://doi.org/10.1016/j.icarus.2017.11.033 The trailing loss curves are calculated with different seeing values: 0.5, 0.7 and 1.0.
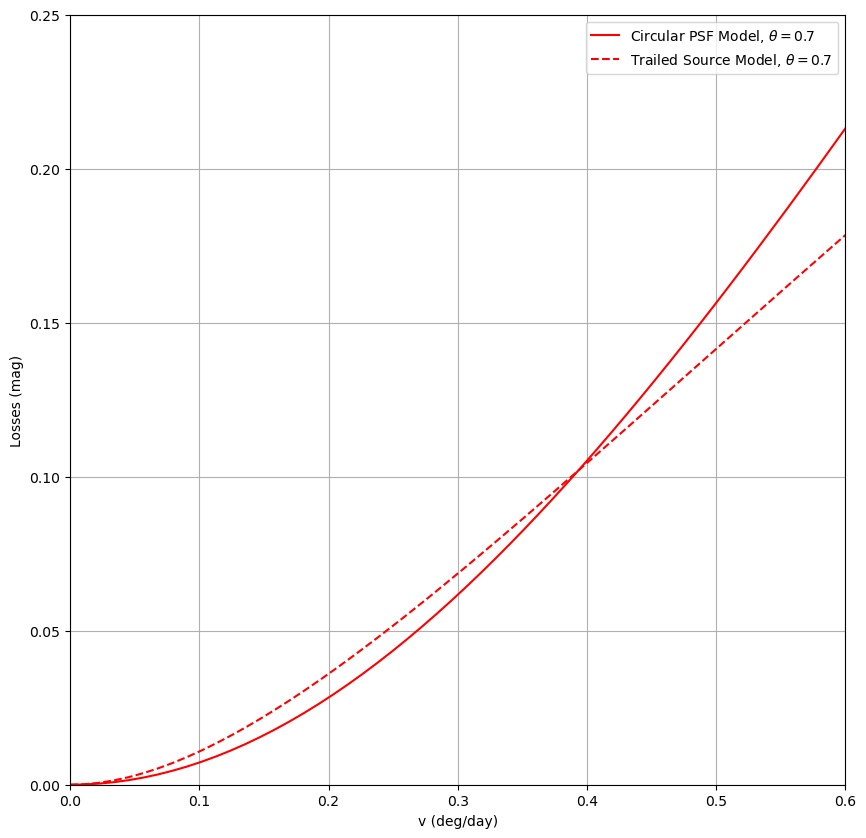
The zoom-in of the difference between PSF trailing loss and combined PSF and detection trailing loss components.
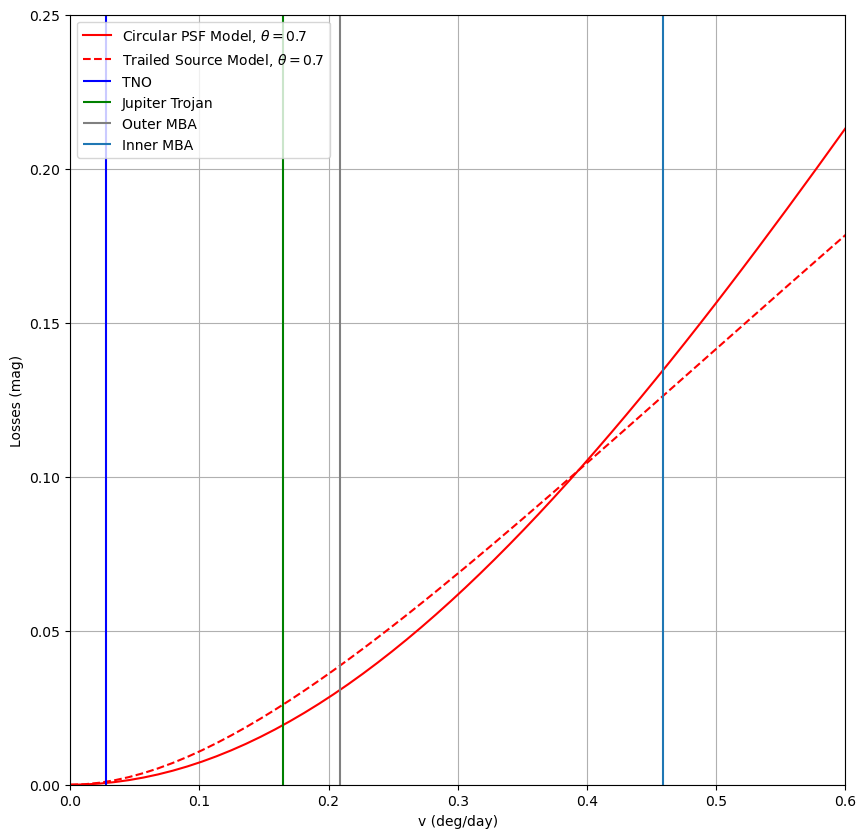
Thresholds for typical on sky motions (formula 1 from Luu and Jewitt 1988, AJ 95 1256, https://ui.adsabs.harvard.edu/abs/1988AJ…..95.1256L/abstract ) for objects at opposition distances for typical dynamical groups: 1 au (inner MBA), 3 au (outer MBA), 4 au (Jupiter Trojan), 35 au (TNOs).
[2]:
theta = [0.5, 0.7, 1.0]
dra = np.linspace(0, 8.0, 1000) #deg/day
ddec = np.linspace(0, 8.0, 1000) #deg/day
v = np.sqrt(dra**2 + ddec**2) #deg/day
lossesCircularPSF5 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[0], model="circularPSF")
lossesTrailedSource5 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[0], model="trailedSource")
lossesCircularPSF7 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[1], model="circularPSF")
lossesTrailedSource7 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[1], model="trailedSource")
lossesCircularPSF10 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[2], model="circularPSF")
lossesTrailedSource10 = PPTrailingLoss.calcTrailingLoss(dra, ddec, theta[2], model="trailedSource")
[3]:
fig = plt.figure(figsize=(10, 10))
plt.plot(v, lossesCircularPSF5, color='blue', label=r'Circular PSF Model, $\theta=0.5$')
plt.plot(v, lossesTrailedSource5, '--',color='blue', label=r'Trailed Source Model, $\theta=0.5$')
plt.plot(v, lossesCircularPSF7, color='red', label=r'Circular PSF Model, $\theta=0.7$')
plt.plot(v, lossesTrailedSource7, '--',color='red', label=r'Trailed Source Model, $\theta=0.7$')
plt.plot(v, lossesCircularPSF10, color='gray', label=r'Circular PSF Model, $\theta=1.0$')
plt.plot(v, lossesTrailedSource10, '--',color='gray', label=r'Trailed Source Model, $\theta=1.0$')
#plt.title("θ = 0.5")
plt.legend()
#plt.xlim(0., 0.2)
plt.xlabel("v (deg/day)")
plt.ylabel("Losses (mag)")
plt.grid()
plt.show()
[4]:
fig = plt.figure(figsize=(10, 10))
plt.plot(v, lossesCircularPSF7, color='red', label=r'Circular PSF Model, $\theta=0.7$')
plt.plot(v, lossesTrailedSource7, '--',color='red', label=r'Trailed Source Model, $\theta=0.7$')
plt.legend()
plt.xlim(0., 0.6)
plt.ylim(0., 0.25)
plt.xlabel("v (deg/day)")
plt.ylabel("Losses (mag)")
plt.grid()
plt.show()
[5]:
R = np.array([1.1,3.,4.,30.])
typical_motions = 148.0*(1-R**-0.5)/(R-1) #arcsec/hour
typical_motions /= 3600.
typical_motions *= 24.
[6]:
typical_motions
[6]:
array([0.45916912, 0.2085072 , 0.16444444, 0.02781127])
[7]:
fig = plt.figure(figsize=(10, 10))
plt.plot(v, lossesCircularPSF7, color='red', label=r'Circular PSF Model, $\theta=0.7$')
plt.plot(v, lossesTrailedSource7, '--',color='red', label=r'Trailed Source Model, $\theta=0.7$')
plt.vlines(typical_motions[-1], 0.0, 2.5, label='TNO', color='b')
plt.vlines(typical_motions[-2], 0.0, 2.5, label='Jupiter Trojan', color='g')
plt.vlines(typical_motions[-3], 0.0, 2.5, label='Outer MBA', color='gray')
plt.vlines(typical_motions[-4], 0.0, 2.5, label='Inner MBA')
plt.legend()
plt.xlim(0., .6)
plt.ylim(0., 0.25)
plt.xlabel("v (deg/day)")
plt.ylabel("Losses (mag)")
plt.grid()
plt.show()